PRINCIPLES OF ENGINEERING
What is POE?
Through problems that engage and challenge, students explore a broad range of engineering topics, including mechanisms, the strength of structures and materials, and automation. Students develop skills in problem solving, research, and design while learning strategies for design process documentation, collaboration, and presentation. (www.pltw.org)
Ballistics Device
Description |
Design |
|
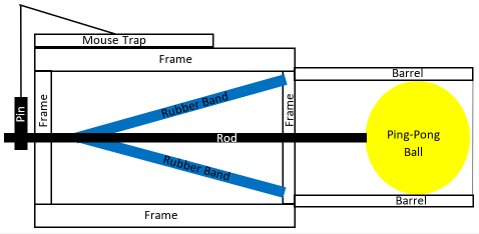
The Ballistics Device was a project where I designed and built a device to launch a ping-pong ball at a target.
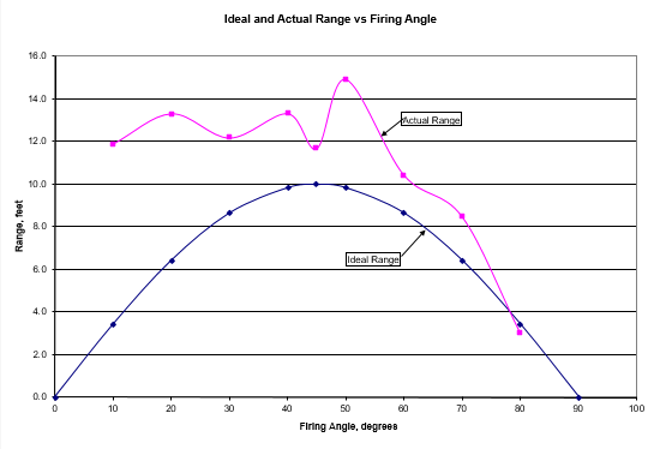
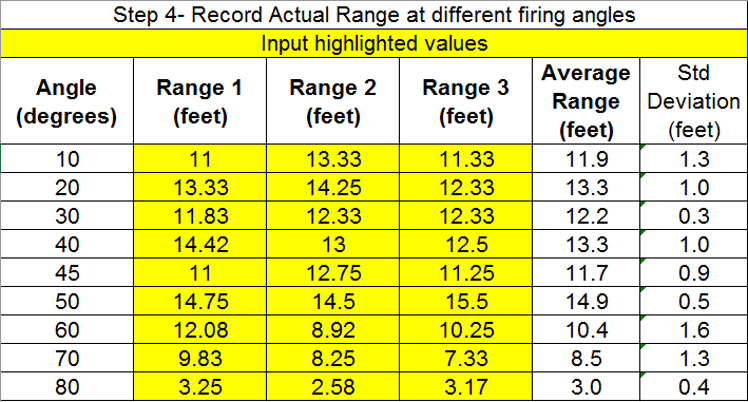
TestingAs shown in the graph and data table, the device was very inconsistent. The graph shows how the range changes based on firing angle using both ideal (blue) and real-world (pink) calculations. The data table shows the data which was used to make these calculations. One source of error may be due in part to testing outside where the environment had greater effects. On test day, the inconsistency of the device made it difficult to hit the target. Additionally, the ping-pong ball often landed to the right of the target. This suggests the barrel was not square to the frame.
|
My device used rubber bands to launch the ping-pong ball. The rubber bands pull a rod inside the frame and the rod pushed the ball out of the barrel. The holes in the barrel decreased the drag on the ball in the barrel. The mouse trap was used as a trigger. When tripped, the mouse trap removed a pin which released the push-rod. The frame is on a pivot which can hold any angle from 0°-90° above horizontal.

|
|
|
Machine Control
Description |
Robot Design |
|
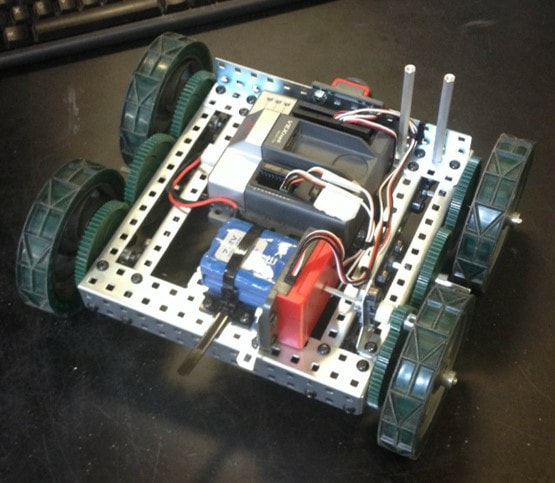
In this project, I built a robot to complete two challenges. These challenges included both a maze, and an up–and–back “sprints” challenge. In this unit, I learned about the following:
|
For this project, I used a pre-designed robot from Vex Robotics. This robot has a small chassis with a “skid-steer” or “tank” drive train. This means that both wheels on either side are mechanically linked to work together, but each side works independently of the other side. This gives the robot high maneuverability and agility.
|
Maze Challenge
|
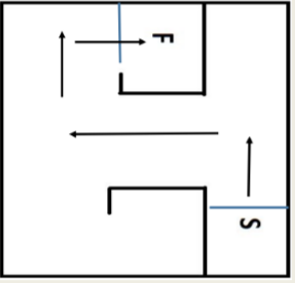
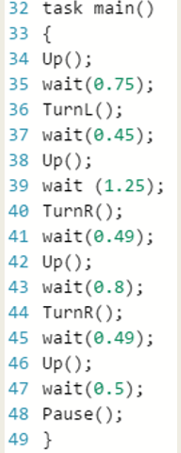
For this challenge called the Maze (shown left), the robot had to begin fully in the start (S) box, drive through the course (shown by the arrows), and end fully in the finish (F) box without crossing any of the black lines. One limitation was that I had to use an open-loop program using time. The program I used is shown to the right.
|
|
Sprints Challenge

|
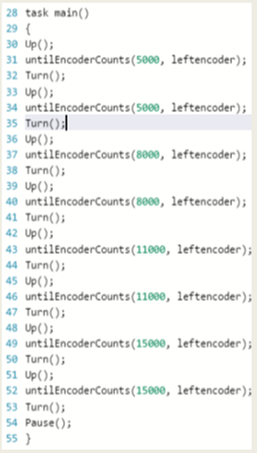
For this challenge called the Sprints (shown left), the robot had to begin behind the start line, drive past the first line, perform a 180° U-turn, cross the start line, and perform another 180° U-turn. The robot then had to repeat this maneuver for four lines, each further than the last. In this challenge, I had to use a closed loop program using an encoder, which measures the amount of rotation of one drive axle. The program I used is shown to the right.
|
|
